-
Courriel
2880635307@qq.com
-
Téléphone
18860995252
-
Adresse
Parc industriel de l'ASEAN, ville de nanqian, Jiangyin, Jiangsu
Catégories de produits
- Compteurs de puissance réseau série ACR
- Compteur d'énergie multifonction ADL Rail
- Instruments de mesure électrique programmables série AMC
- Unité à trois distances série artu
- Dispositif de protection de ligne basse tension intelligent ALP
- Contrôleur de redémarrage ard Shake
- Protecteur de moteur intelligent Ard
- Compteurs de puissance réseau série APM
- Capteur de courant intelligent série ba
- Artm appareillage thermométrique électrique en ligne
Jiangsu ankori Electrical Manufacturing Co., Ltd
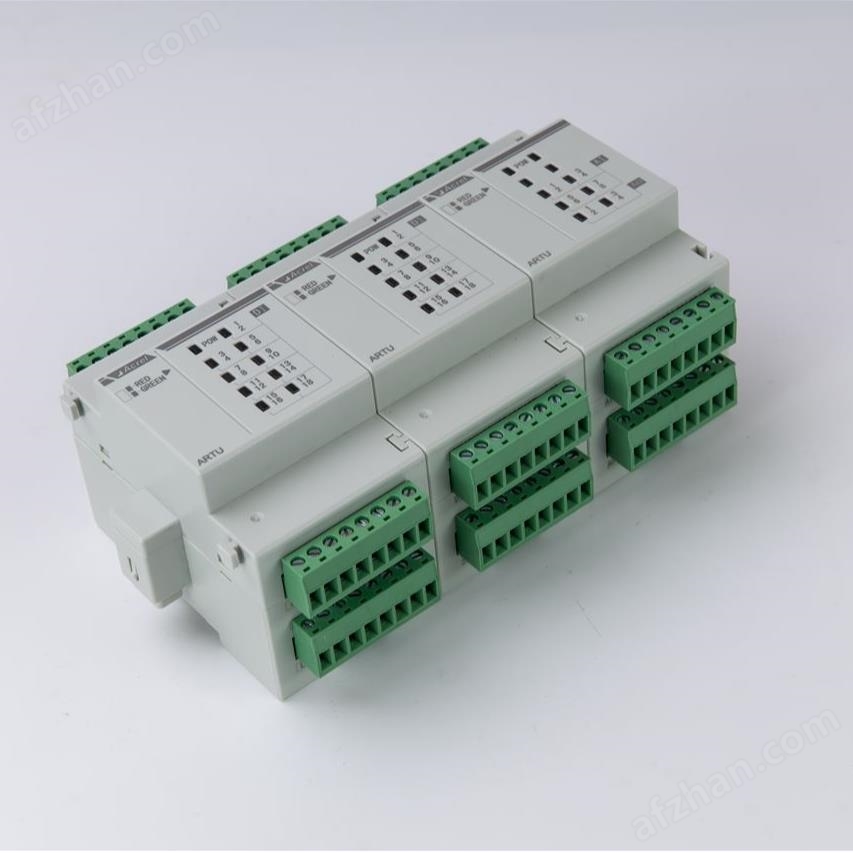


Unité terminale distante série ankory artu
NégociableMise à jour sur01/08
- Modèle
- Nature du fabricant
- producteurs
- Catégorie de produit
- Lieu d'origine
Vue d'ensemble
Les unités de terminaison à distance de la série arcory artu sont des éléments intelligents de distribution d'énergie de haute performance utilisés dans la distribution d'énergie intelligente, l'automatisation industrielle et d'autres domaines. L'unité de terminaison à distance de la série artu100 fournit une entrée de quantité de commutation, une sortie de quantité de commutation, une entrée de quantité analogique, une sortie de quantité analogique, capable de transmettre le signal acquis à l'arrière - plan via le port série RS485, l'interface Ethernet RJ45, la communication sans fil 2G, Lora, 4g.
Détails du produit
1. Description du modèle

Remarque: lorsque le module est sélectionnéLe module d'alimentation mpow est obligatoire.
2. Paramètres techniques
Sujet:

Fonctions optionnelles:

Autres paramètres techniques:

3. Dimensions extérieures

Remarque: la longueur du corps est90mm, La longueur du module est de 54mm et la longueur du module d'alimentation est de 54mm.
4. Méthode d'installation
Avec rail de guidage, double installation murale.
5. Mise en service et maintenance
5.1 instructions d'utilisation
1)Vérifiez d'abord que le cordon d'alimentation est correctement accessible avant de le mettre sous tension.
2)Après mise sous tension, indicateur d'alimentation (Power) est allumé et le voyant Run (Run) commence à clignoter à intervalles de 1 seconde.
3)Établissement des communications
a)Accès correctBus RS485 et connecté à la machine de mise en position.
b)La machine de positionnement émet des commandes au format Statute en fonction du numéro de station et du débit en bauds du module. Le voyant de communication du module clignote à ce moment - là, indiquant que le module a reçu la commande de la machine de mise à niveau et a répondu, c'est - à - dire que la communication a été établie.
5.2 mise en service
1)Vérifiez que l'alimentation est correctement connectée avant de la mettre sous tension.
2)Après mise sous tension, observez si le voyant d'alimentation s'allume ou non, si ce n'est pas le cas, cela indique que l'alimentation n'est pas ajoutée.
3)Observez si le voyant de fonctionnement clignote ou non, ce qui indique que le module ne fonctionne pas correctement.
4)Ce n'est que lorsque le voyant de communication clignote que cela indique que la communication est établie.
5)Définissez l'intervalle de temps de requête de la machine binaire supérieure. Étant donné que le bus est semi - duplex, la machine de mise à niveau doit définir un intervalle de temps approprié, l'intervalle de temps doit être déterminé en fonction de la longueur et du débit en bauds de la commande de réponse du module, et un mauvais réglage de l'intervalle de temps peut entraîner l'échec de la communication.
Produit similaire Recommander


