06,05,2026 42vues
【La Ville intelligenteÉvaluation des produits WebLe 22 avril, Chihiro Positioning a officiellement publié le jeu de produits « cerveau spatixbot», qui est basé sur la base de la technologie de liaison complète intelligente Chihiro Positioning spatixbot, la capacité de fusionner un grand modèle universel, un modèle professionnel auto - étudié, de construire une synergie de marche autonome, de perception de l'environnement et de groupe couvrant l'intérieur et l'extérieur, pour aiderRobotEffectuez des traversées critiques de la télécommande à l'autonomie, de la performance au combat réel, du travail en monocoque à l'intelligence de groupe, accélérant l'atterrissage à grande échelle du robot dans des scénarios tels que la patrouille, la sécurité, les secours d'urgence et plus encore. Selon le rapport, « cerveau de l'espace - temps corporel» est principalement destiné aux fabricants d'ontologies robotiques et aux clients d'applications de l'industrie de l'intelligence corporelle, couvrant les robots humanoïdes, les chiens - machines,drone, véhicules sans pilote, tondeuses à gazon et d'autres types de formes individuelles, visant à fournir une base spatio - temporelle unifiée pour tous les types d'équipements.
Chen jinpei, PDG de Chihiro Positioning, a déclaré: « le cerveau spatio - temporel corporel est un ensemble de centres nerveux qui aident les robots à comprendre leur environnement, à prendre des décisions et à effectuer des tâches. Nous fournissons à la fois des capacités de perception spatio - temporelle convergentes Multi - sources pour les robots, ainsi qu'un raisonnement de formation et un soutien aux compétences scéniques dans des applications scéniques spécifiques, permettant aux robots de passer de « voir et marcher» à « lire et juger», accélérant ainsi les applications au sol à l'échelle de l'intelligence personnelle.
Robot de la télécommande à l'autonomie, la clé de la victoire réside dans la localisation et la perception
Dans un marathon de robots humanoïdes, courir de manière autonome signifie que le robot doit effectuer indépendamment le positionnement, la planification de la trajectoire, le contrôle de la posture et la prise de décision en temps réel dans un environnement extérieur ouvert. Seule la capacité de positionnement et de perception au niveau du centimètre dynamique garantit la précision du trajet et la stabilité du mouvement.
Cette capacité est précisément l'un des seuils importants vers des scénarios d'application réels pour les robots.

"Cerveau spatio - temporel" diagramme d'architecture de produit
Autour de cette question centrale, le « cerveau spatio - temporel» de chihiroshi a lancé un dispositif de perception clé, le terminal de fusion Multisource « œil dans l'espace - temps», qui permet un positionnement précis du robot dans des environnements intérieurs et extérieurs avec une articulation transparente. Dans un environnement extérieur, le module GNSS de haute précision pour l'auto - étude de la position de Chihiro fournit au robot un « sens de l'orientation» au niveau du centimètre; En entrant à l'intérieur, grâce à la technologie binoculaire V - SLAM (Visual Synchronous Positioning & Mapping construction) soutenue par une puissance de calcul élevée côté extrémité, et à la technologie de repositionnement visuel, l'œil de l'espace - temps est capable de corriger en temps réel les erreurs accumulées par le robot pendant le trajet, assurant ainsi une stabilisation continue de la trajectoire de mouvement.
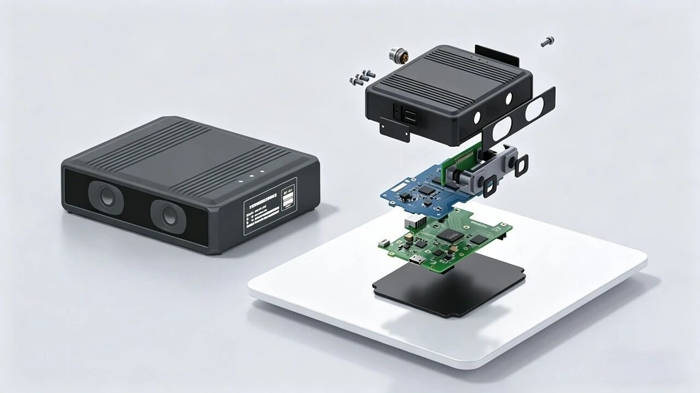
Terminal de fusion Multi - sources – « l’œil de l’espace - temps »
Il est rapporté que dans l'environnement extérieur ouvert ou à l'intérieur de la scène avec une carte pré - construite, "l'œil de l'espace - temps" peut atteindre une erreur horizontale de pas plus de 5 cm et une erreur d'élévation de pas plus de 10 cm de précision de positionnement; En cas d'occultation du signal, d'environnement complexe ou en l'absence de cartes prêtes à l'emploi, la précision de démultiplication (proportion d'erreurs cumulées de positionnement mobile continu occupant la distance de déplacement) de l'oeil dans l'espace - temps peut être contrôlée à 0,75%.
En outre, le « cerveau spatio - temporel» fournit également des cartes de haute précision et une planification des trajectoires qui soutiennent les actions de navigation autonomes du panbot, ce qui permet au robot de fonctionner de manière constante et stable dans des scénarios tels que l'inspection des parcs, la sécurité urbaine, l'inspection de terrains complexes, etc.
De « utilisable » à « bon à utiliser », les milliers de requêtes permettent aux robots de se lancer rapidement
Après avoir résolu le problème de la « précision de la lecture et de la marche», les robots qui peuvent vraiment travailler doivent également « comprendre et juger».
À cette fin, le « cerveau spatio - temporel personnel» a également construit une plate - forme de « formation tout - en - un» orientée vers l'intelligence personnelle, qui facilite la formation de modèles et le déploiement de l'inférence pour former une boucle fermée complète de données et d'algorithmes.
La plate - forme combine les capacités génériques des grands modèles multimodaux tels que les kiloasks génériques avec les capacités spécialisées des petits modèles visuels pour permettre un processus tout - en - un de dimensionnement des données, de formation des modèles, d'optimisation des modèles et d'inférence en temps réel grâce à un cadre unifié. Dans les applications pratiques, les grands modèles sont responsables de la capacité de reconnaissance et de contrôle de zéro échantillon, tandis que les petits modèles améliorent l'efficacité du raisonnement et la précision de la reconnaissance dans des scénarios spécifiques grâce à une formation continue.
Xu Yuanbo, expert en produits senior de qiancho location, a présenté, à titre d'exemple, l'inspection des eaux par drone, au début du projet, la « plate - forme tout - en - un de formation» peut être basée sur un grand modèle universel multimodal, pour compléter rapidement l'identification des objectifs tels que les « déchets flottants de surface et autres»; Au fur et à mesure que les données recueillies par les patrouilles s'accumulent, des itérations d'entraînement sont effectuées sur des mini - modèles visuels dédiés pour réduire les illusions et améliorer la vitesse et la précision du raisonnement. Dans le même temps, les grands modèles calibrent et complètent les résultats d'identification des petits modèles pour former un volant de données en évolution continue. En s'appuyant sur de petits modèles bien formés avec des données spécifiques et en synergie avec de grands modèles, la précision de l'identification des cibles peut finalement atteindre plus de 95%.
Ce mécanisme permet au robot de « prendre rapidement ses fonctions» dans des scénarios tels que la patrouille de sécurité publique, la patrouille du réseau électrique, la gestion du parc, les secours d'urgence, etc., permettant une mise à niveau des capacités de « déploiement rapide» à « optimisation continue».
En plus de la réalisation de « l'intelligence monolithique», en tant que centre d'intelligence de groupe sous la référence unifiée de l'espace - temps, le « cerveau de l'espace - temps» de chihiroshi peut également stimuler le travail collaboratif des robots humanoïdes, des chiens - machines, des drones, des véhicules sans pilote et d'autres Dans des environnements complexes pour réaliser le saut de « l'intelligence de groupe».
Chihiro position né pour les robots, trillions d'appels pour créer une base technique solide
En tant que l'une des industries de l'avenir de la mise en page prospective de la période « Quinze - Cinq», l'industrie de l'intelligence corporelle représentée par les robots humanoïdes accélère le passage du laboratoire au terrain de formation pratique, 2025 est considérée par l'industrie comme l '« Année de production de masse» des robots humanoïdes, l'industrie passe de la phase de vérification de la démonstration à une nouvelle phase de livraison à l'échelle et d'exploration pratique.
Dans ce contexte, Chihiro continue de faire progresser l'évolution des produits et des systèmes technologiques. En avril 2025, le « Space - time Intelligent tribody Kit » a été lancé pour fournir aux robots des informations spatio - temporelles précises, fiables et sécurisées dans des environnements intégrés à l’intérieur et à l’extérieur, leur donnant un « sens de l’orientation » similaire à celui des humains. Le kit a couvert plusieurs entreprises intelligentes de la tête et des marques de robots bien connues.
La sortie du « cerveau spatio - temporel personnel» est une extension supplémentaire de cette voie technologique. Derrière cela, il ne s'agit pas d'une seule percée, mais d'une libération concentrée de milliers de positions accumulées depuis longtemps dans le domaine de l'intelligence spatio - temporelle. À l'heure actuelle, l'utilisation mensuelle du Service d'intelligence spatio - temporelle a dépassé les billions de fois, couvrant plus de 4 millions de voitures intelligentes, 60 millions de smartphones, 200 000 véhicules aériens à basse altitude et plus de 100 000 appareils de mesure et d'ingénierie, devenant ainsi la première plate - forme de service d'intelligence spatio - temporelle au monde à atteindre cette échelle.
Avec l'évolution continue des capacités de base telles que le « cerveau de l'espace - temps», les robots seront mis à l'échelle dans des scénarios plus complexes, devenant un élément essentiel du fonctionnement des villes, de la modernisation industrielle et de la sécurité publique. Alors que des centaines de millions de robots partagent un réseau de référence spatio - temporel, l’intelligence de masse ne s’arrêtera plus au laboratoire – un monde intelligent profondément engagé par les robots qui s’accélère.